
3D机器人物位计SSPR900系列,在太赫兹调频连续波 FMCW 测距的基础上,由旋转及俯仰结构带动3D机器人物位计传感器进行多维度转动以环视高分辨率扫描料 仓内部以及物料表面,3D机器人物位计传感器每运行到一个预定位置/角度,则从其天线发 射出微波信号,该微波信号碰到待测物后经反射被天线所接收,然后将3D机器人物位计传感器运行到下一个预定位置/角度,以此完成整个检测周期的测量,从而获得整个 检测周期中各个位置/角度对应的物位测量信息,利用各个位置/角度信息、各个 位置/角度对应的物位测量信息进行运算处理,建立三维空间坐标系,获得三维 点云坐标值,从而实现三维建模,生成三维可视化图像,计算获得体积、质量、 料位等相关参数。一个检测周期测量完成,则进行下一个检测周期的测量,这个 测量过程会持续重复运行下去,直到接收到主机的上位机软件发送的停止运行指令。

图1 3D机器人物位计效果图

采用技术,分辨率更高,检测性能更稳定; 二维轴向360°扫描,进行目标高精度成像; 天线波束角度小,测量更精准,检测距离更远; 最远探测距离30 米, 适用于大型库房远距离检测; 支持 RS485、网口通信,可快速输出点云信息; 带有WiFi调试功能,可无线连接直接调试参数; 全天候工作,不受雨水、灰尘、光线、温度等环境影响。

3D机器人物位计天线波束角度极窄,通过2维轴向扫描,最终达到3D成像的效果,用户可根据3D机器人物位计呈现出来的效果进行盘库、目标识别、体积测量等相关功能开发及联动。
安装位置需避开进料口,尽可能的装在料仓的正中间,如图2所示。
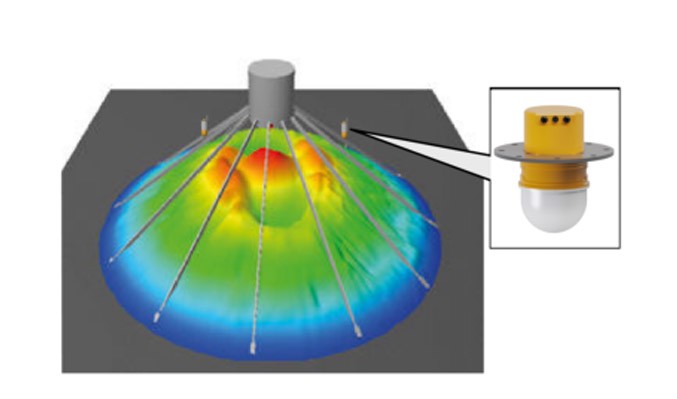
图2 3D机器人物位计工作示意图
4.2 3D机器人物位计尺寸
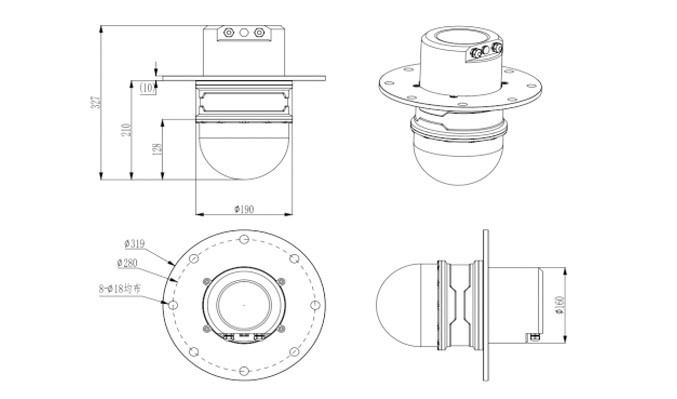
图4 3D机器人物位计整体尺寸图(单位:mm)
4.2 3D机器人物位计尺
3D机器人物位计线束定义如下图所示。
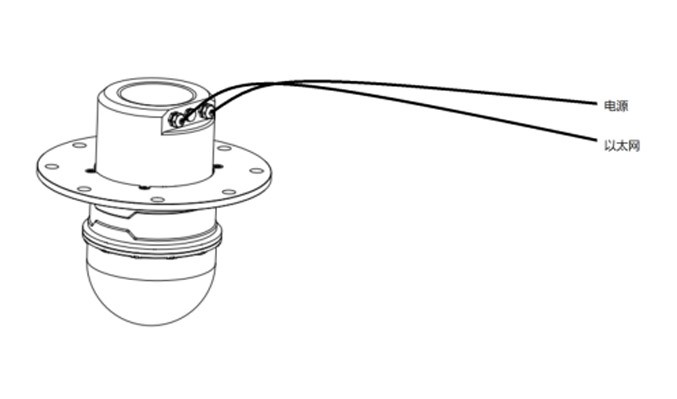
图5 3D机器人物位计线束定义
以太网接口:可通过以太网接口连接上位机,输出实时点云数据,进行点云成像;
电源接口:24V直流电输入;
4.4 对外接口
外部设备通过百兆以太网与3D机器人物位计进行通讯,实现3D机器人物位计参数的读取与设置。网口参数如下:
物理接口:RJ45
传输控制协议:TCP
默认IP:172.16.10.151
数据端口:8889
配置端口:8888
3D机器人物位计支持接入用户平台,3D机器人物位计通讯协议详见《毫米波成像3D机器人物位计通讯协议》;
3D机器人物位计配备WiFi调试功能,在用户安装完毕后忘记IP等参数可通过WiFi进行配置,也可通过WiFi配置雷达转速、启停、有效角度等相关参数。
默认WiFi名称:AWHST_DZ_01
默认密码:123456789
5.1打开3D成像平台
任意浏览器、登录边缘服务器地址(例:172.16.10.1),进入料仓系统平台主页面:
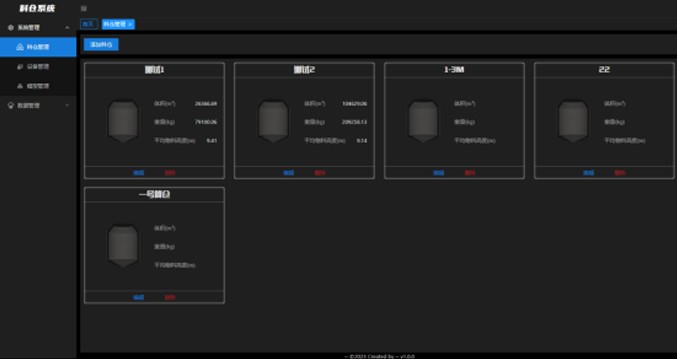
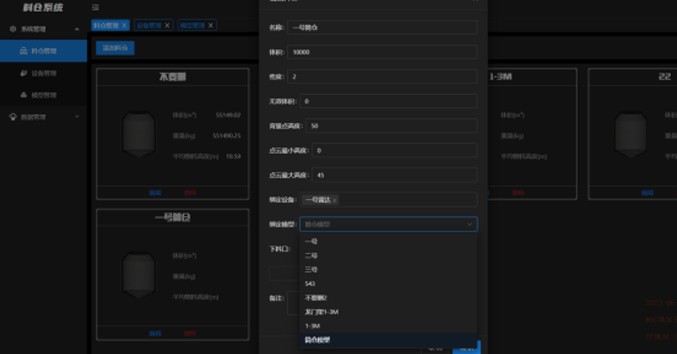
5.2添加料仓
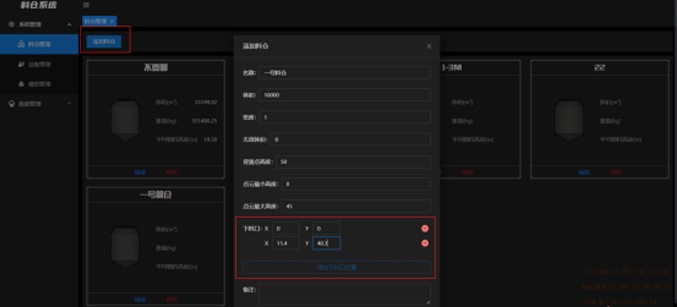
自定义料仓名称以及料仓参数,可添加多个下料口位置,也可不添加。
其中:
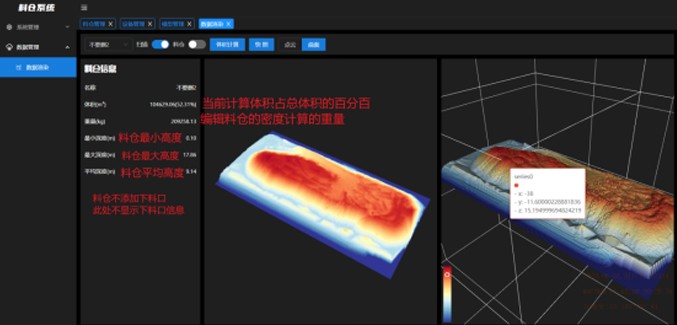
添加料仓体积:为料仓总体积,计算完成实际体积后,输出百分比;
添加料仓密度:给定物料密度,用于计算实际重量;
无效体积:计算完实际体积后删减的体积大小;
背景点高度:3D机器人物位计扫描出来的点云此高度以上认定为背景剔除;
点云最小高度和最大高度:限定选取的点云高度
下料口:添加下料口位置坐标
5.3添加设备
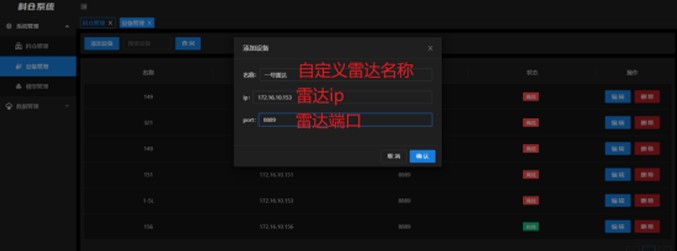
输入3D机器人物位计名称,ip以及端口添加3D机器人物位计设备,连接成功的3D机器人物位计为在线状态,否则为离线状态。
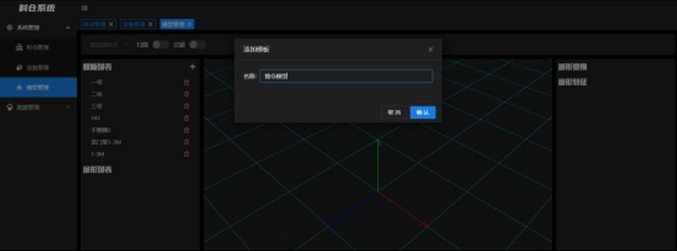
5.4添加模版并绑定图形
自定义模版名称,支持模版中添加圆柱、立方体和球形、大小位置都可以自定义。
添加后的模型中心为(0,0,0),需要根据实际进行xyz的平移和旋转。

5.5 料仓绑定3D机器人物位计设备和自定义的模型
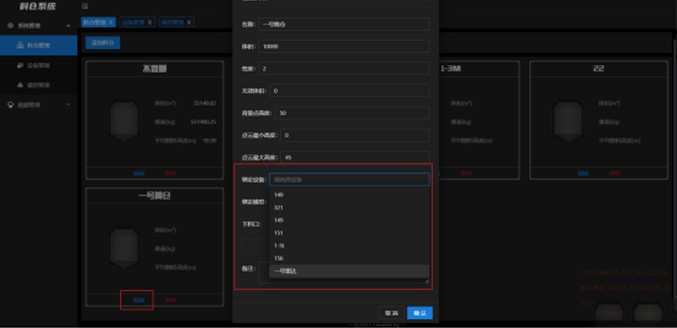
在料仓管理位置编辑料仓,将建好的模型和添加的设备绑定到开始建立的料仓上
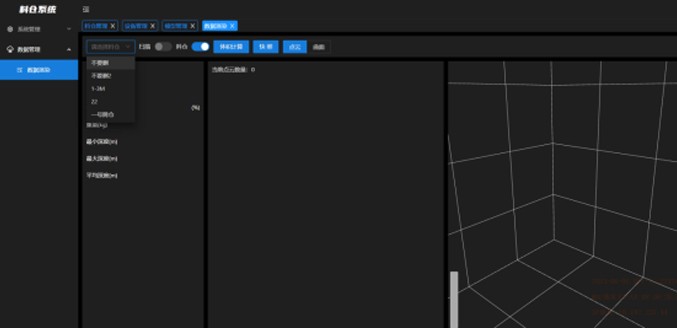
5.6数据渲染
在数据渲染界面,选择料仓后,开始扫描,等待扫描点云完成后,点击体积计算,会自动出现渲染结果和计算的体积大小。
5.7首页总览
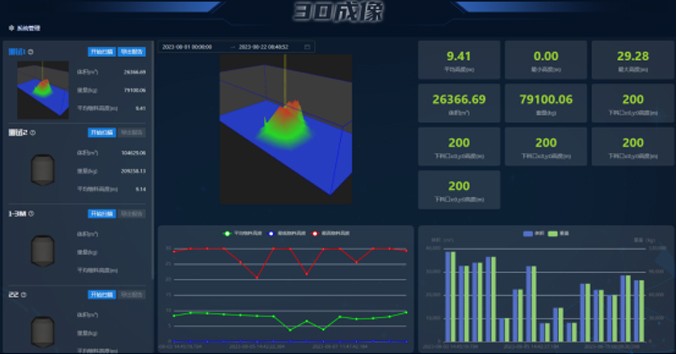
分别查看不同料仓的最后一次扫描结果以及高度历史曲线、体积历史曲线等;
平均高度:指拟合曲面的平均高度
最小高度:拟合曲线后最小高度
最大高度:拟合曲面后最大高度
体积:根据拟合图形计算的体积大小
重量:根据料仓管理输入的密度计算的体积
下料口高度:料仓管理指定位置的高度
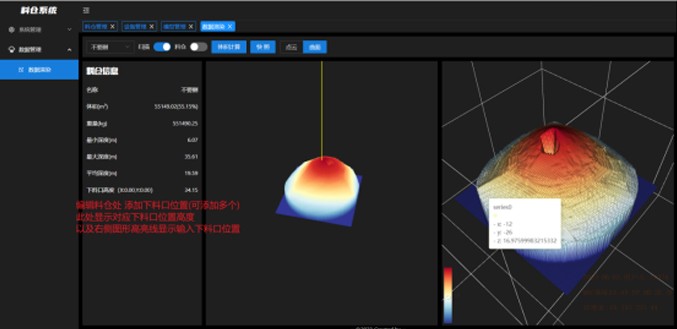
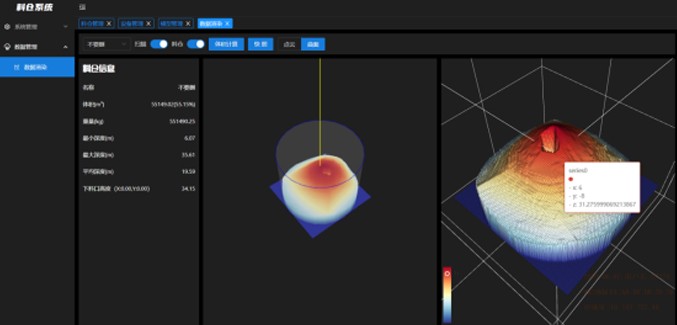
5.8 演示实例
演示实例1:圆柱筒仓 直径60m
选择料仓后,点击扫描,待扫描完成后,点击体积计算,会出现如图所示的点云拟合效果和右侧的栅格数据效果,鼠标放到栅格图形任意位置显示点的坐标和对应的高度。
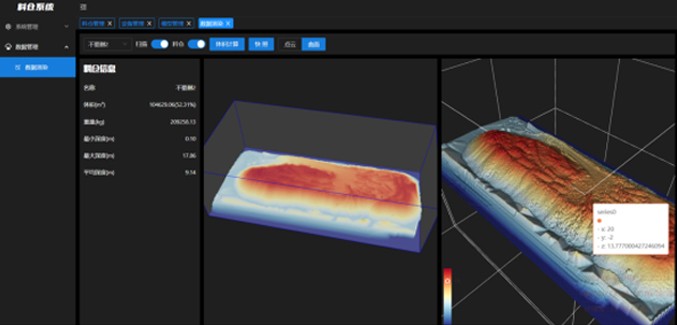
演示实例2:开放式货仓 长160m宽80m
 官方店铺
官方店铺
 移动端二维码
移动端二维码


 鲁公网安备 37060202001660号
鲁公网安备 37060202001660号